Diseño de un lenguaje de programación de robots EPLang
Descripción del proyecto
Este proyecto lo creé en el año 1999.
La idea era crear un lenguaje de programación para poder accionar robots o periféricos conectados en el puerto paralelo del ordenador, pudiendo controlar 8 salidas de una forma sencilla y teniendo a disposición las 8 entradas del puerto.
Por aquella época todavía no existía Arduino y necesitaba poder programar dispositivos electrónicos o mini-autómatas de una forma sencilla y por ese motivo creé el lenguaje EPLang con su entorno de desarrollo.
Partes del proyecto
- Diseño del léxico y parser de un lenguaje de programación fácil de comprender
- Creación de un entorno de desarrollo donde poder escribir dicho lenguaje
- Intérprete visual de la ejecución del lenguaje escrito.
- Creación de una librería .dll en c++ para poder ejecutar el mismo código en un entorno real a través del puerto paralelo del ordenador.
Tanto el entorno de desarrollo como el lenguaje de programación están realizados en Visual Basic 6
La librería .dll que ejecutaba en tiempo real el programa en el puerto paralelo del PC la hice en Visual C++
Algunos ejemplos de código
A continuación muestro algunos ejemplos de código que resumen de lo que se podía hacer en este lenguaje
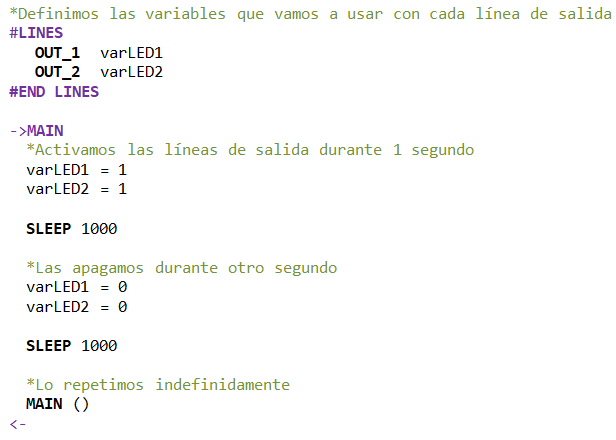
Ejemplo blink sencillo en 2 líneas de salida
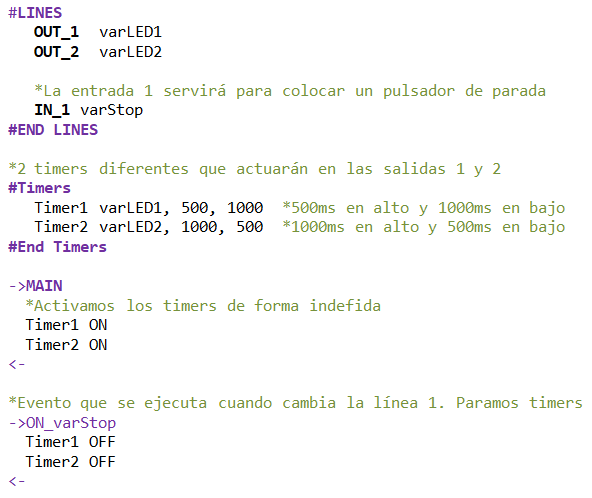
Ejemplo de blink usando Timers y eventos de entrada
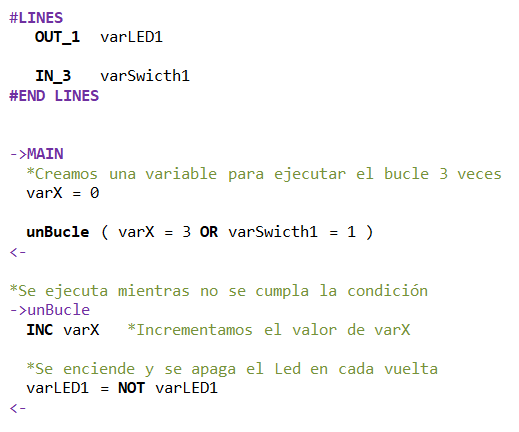
Bucles y condicionales
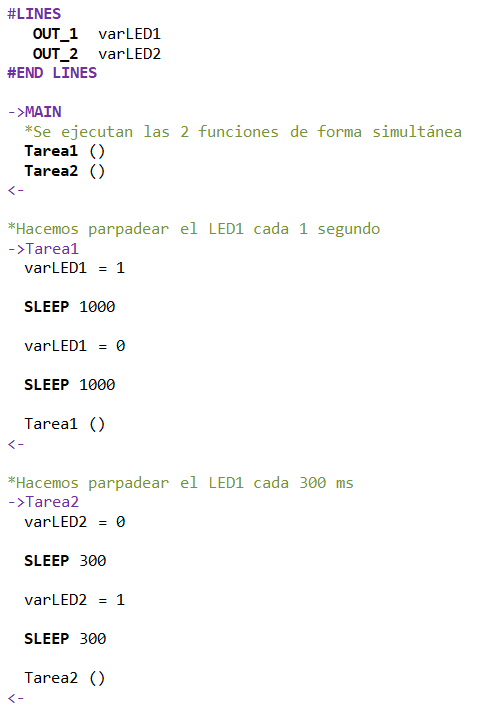
Multitarea